


Le monstre mécanique est un petit projet scolaire visant à nous apprendre l’utilisation des Inverse Kinematics (IK) et la projection de photos pour simuler un environnement réel.
J’ai opté pour un scénario apocalyptique filmé en style “found footage”, afin d’intégrer des mouvements de caméra et des effets spéciaux. Des filtres ont été appliqués afin d’ajouter de l’impact à certaines actions.
Design du robot inspiré par Benjamin Dechantigny
Armature et photos fournies par François Arsenault
Effets sonores: freesound.org

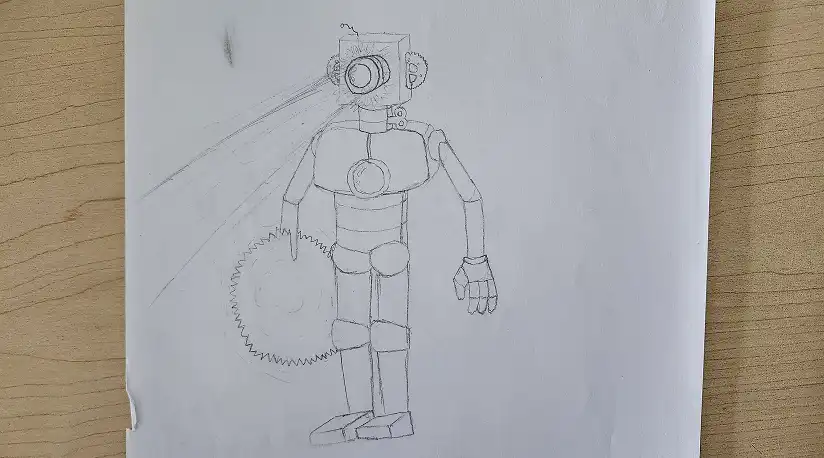
Le robot est basé sur un montage photo fait par un ami. J’ai commencé par dessiner un croquis représentant différentes caractéristiques du design original, notamment l’oeil, les engrenages et la main en scie. Le reste du corps a été adapté en fonction de l’armature fournie par l’enseignant.

Design original
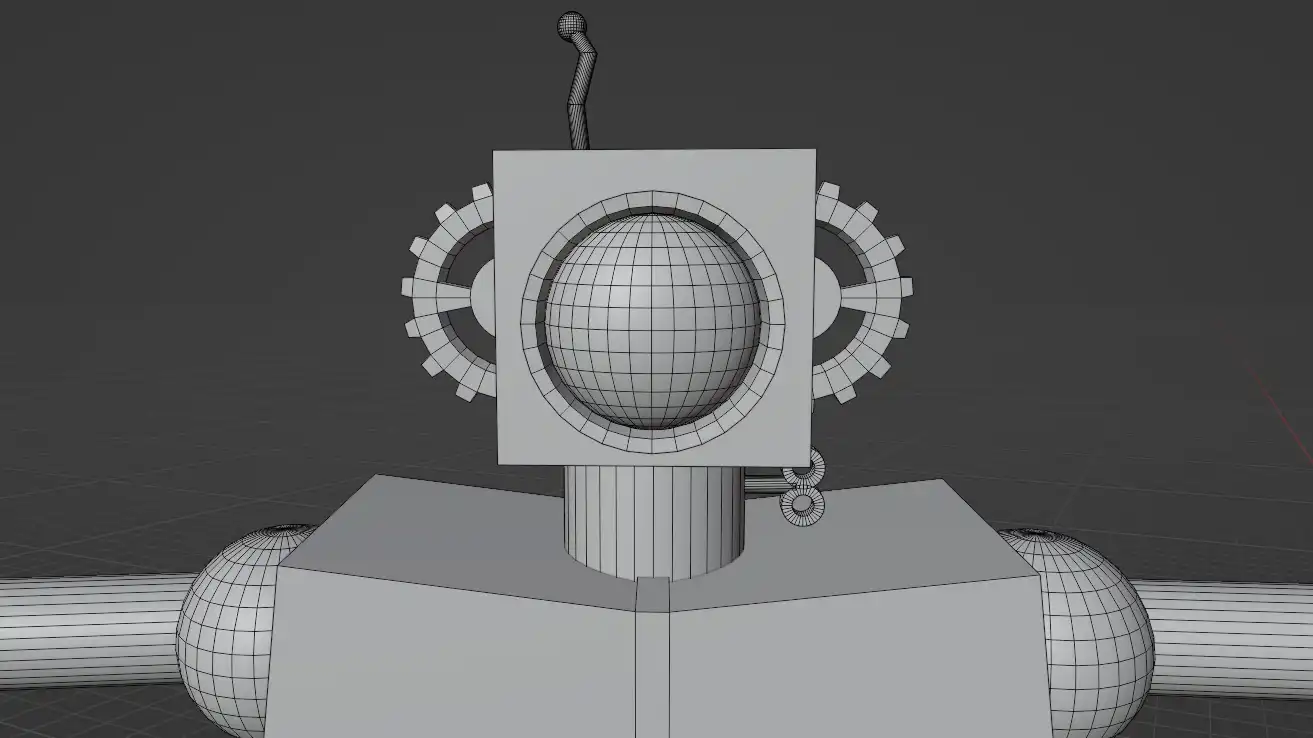
Le robot a été modélisé principalement à partir de formes par défaut. Certains éléments sur la tête contiennent des formes plus complexes. Pour que l'armature fonctionne, il est important que chaque membre soit clairement séparé et relié par un joint quelconque.
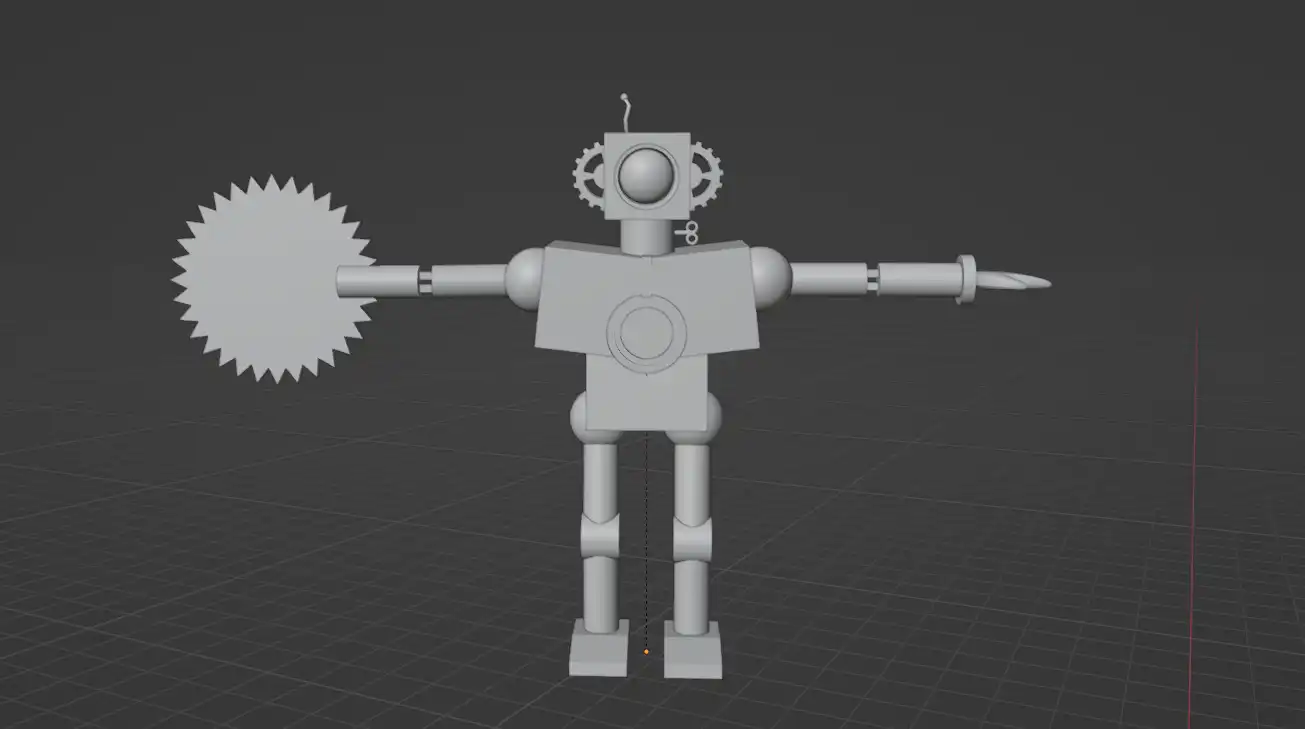
Modèle du robot
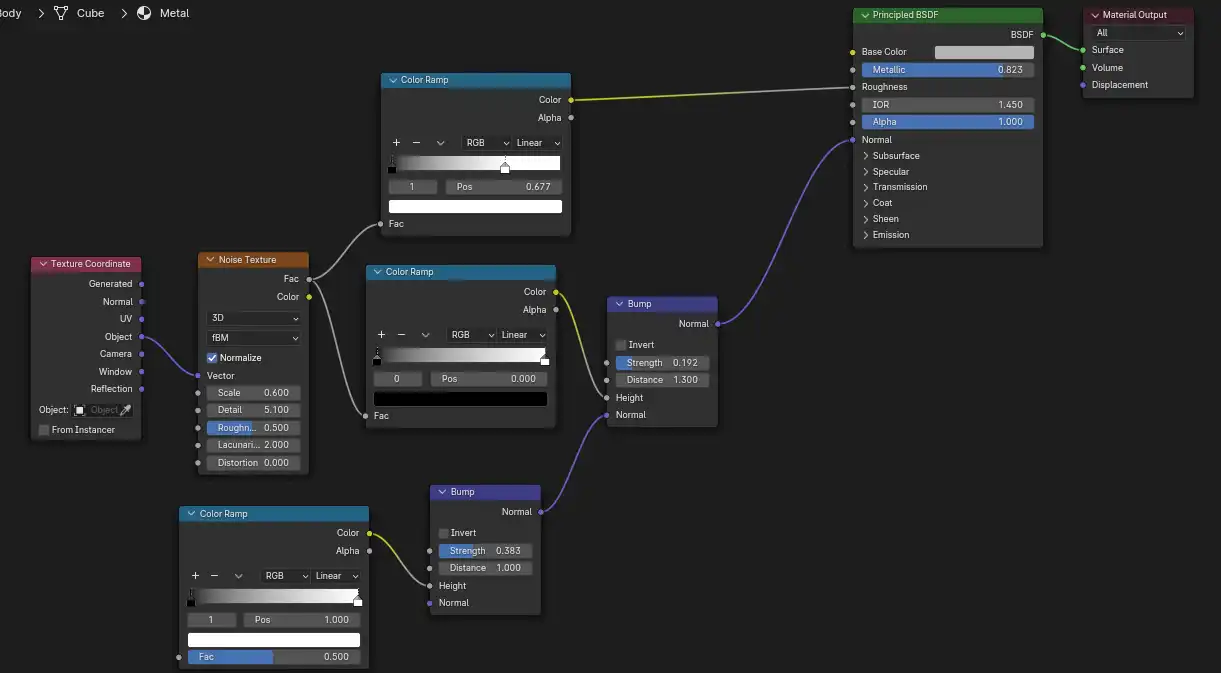
L'un des objectifs de ce projet était de nous faire utiliser des matériaux PBR, donc j'ai créé une texture simulant du métal sale et poqué. La texture est faite avec du noise et du bump. La scie et le réacteur sont des textures images.
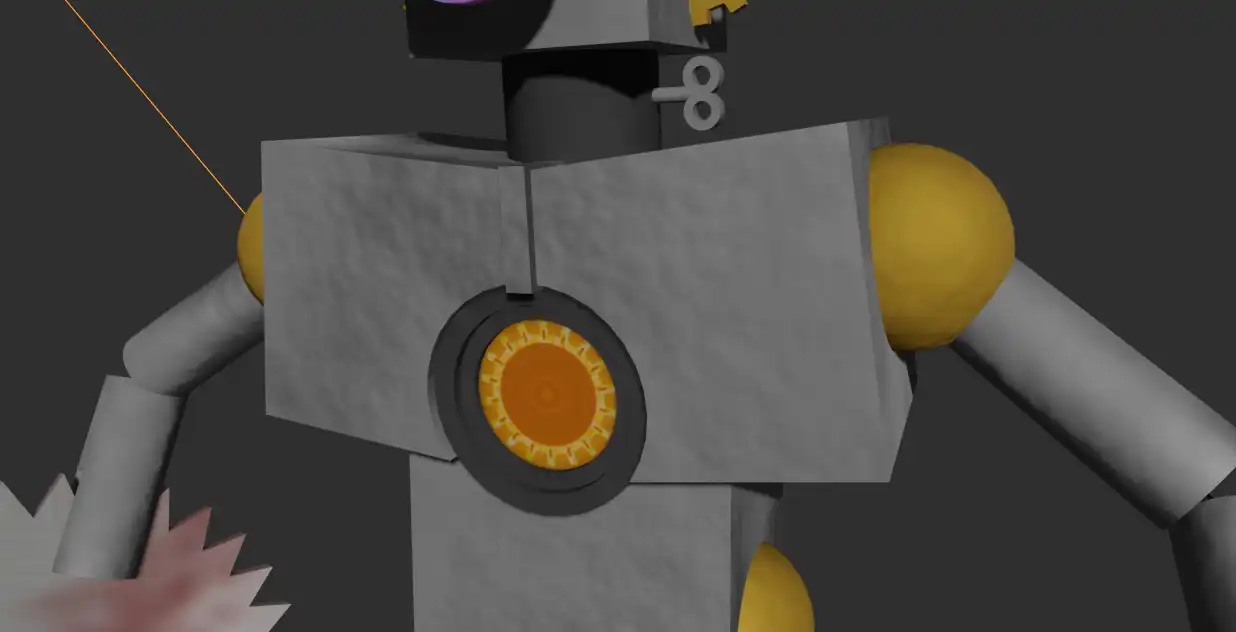
Résultat sur le mesh
L'armature fournie utilise un système d'Inverse Kinematics (IK), avec un bone de contrôle pour les jambes, et un Empty pour contrôler les bras. J'ai dû modifier certains paramètres pour permettre à la scie de rester fixée sur l'avant-bras, sinon elle flottait en l'air.
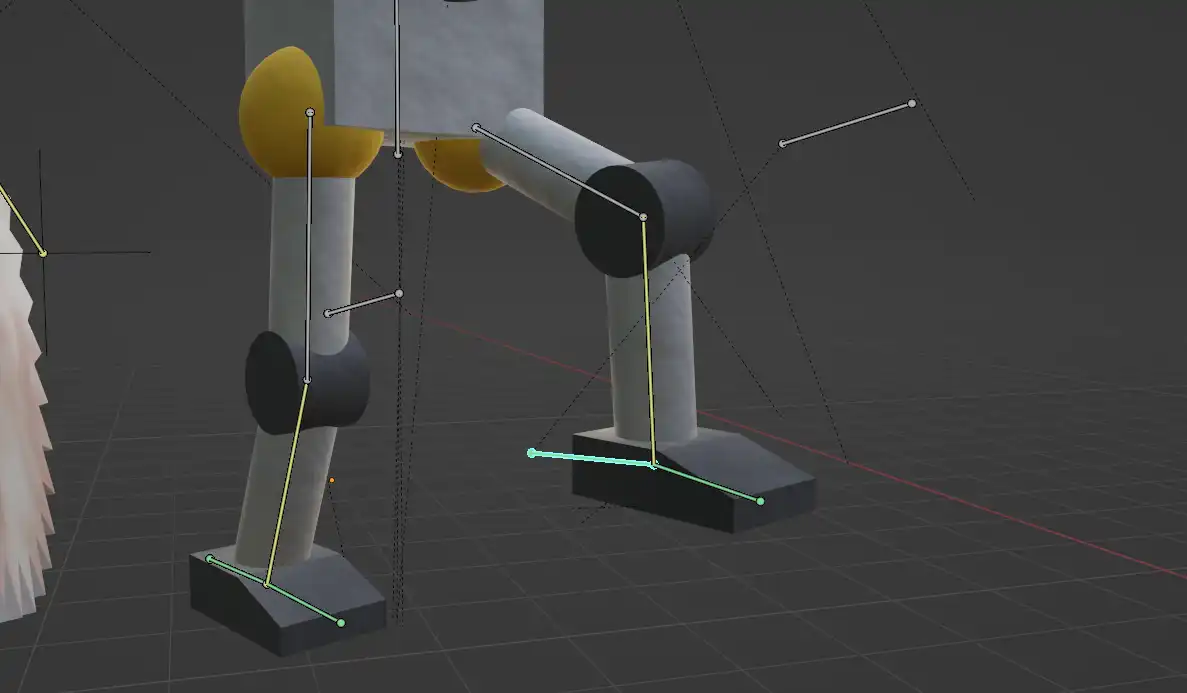
Les jambes ont un bone de contrôle au talon et au genou
Pour l'environnement, il fallait choisir une photo parmi celles fournies par l'enseignant. Puis, il fallait découper un objet en premier-plan pour le mettre dans notre scène 3D en tant que Plane, devant le robot.

Environnement 3D
La tâche principale était d'animer un cycle de marche en utilisant l'armature IK. Le processus s'est fait sans problème. J'ai essayé de faire en sorte que le robot soit constamment en mouvement, même lors qu'il demeure stationnaire, afin de lui donner un allure plus organique. Le laser est un cylindre avec de l'émission, et le tout est rendu sur fond transparent.

Rendu sans image de fond
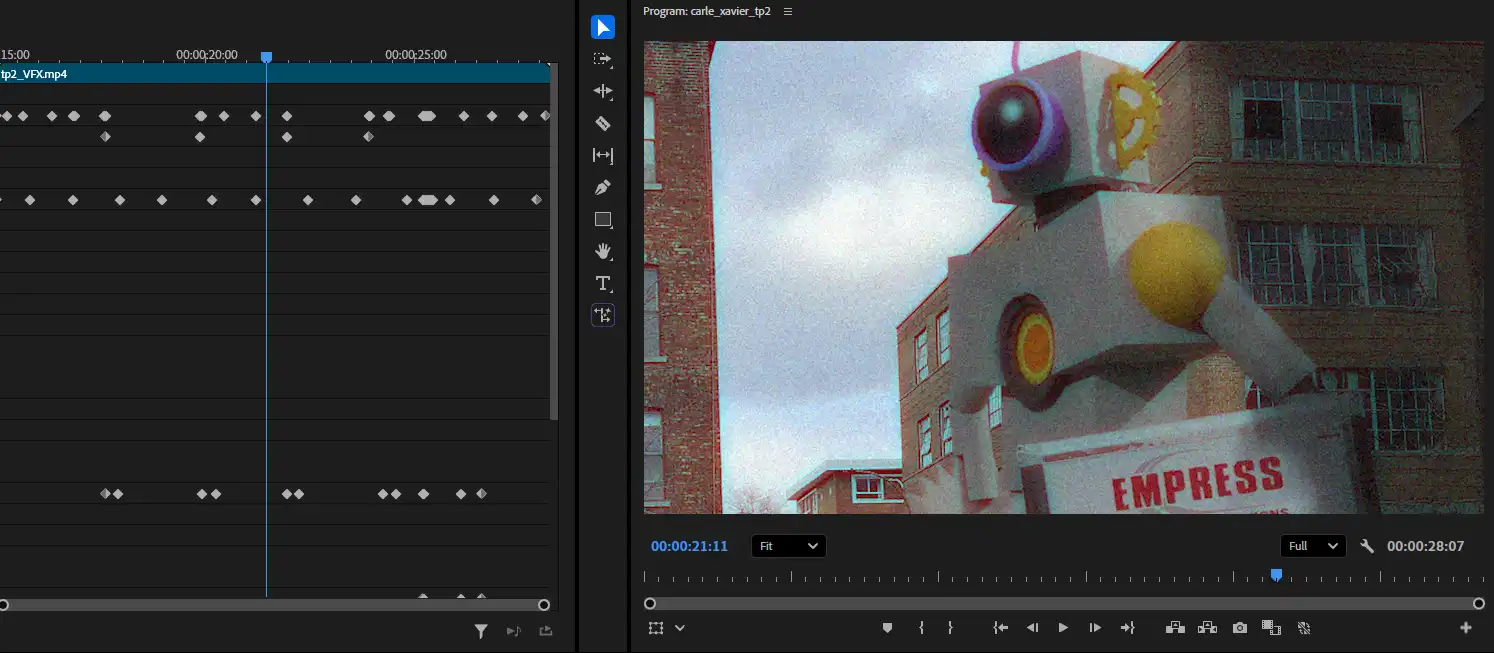
Cette étape n'était pas requise, mais je me suis dit que ça serait le fun. J'ai pris la liberté de manipuler la caméra pour donner au métrage une allure "found footage". J'ai aussi ajouté des filtres pour plus de réalisme et pour renforcer l'impact de certaines actions. Les explosions viennent de Youtube et les effets sonores viennent de freesound.org.

Rendu final avec VFX

Projet scolaire ayant comme thème une ruelle sombre. Utilise de la projection et une vue première personne.

Projet scolaire visant à nous apprendre à générer des montagnes et des objets produits en masse.